
Nicolas Cuperlier, enseignant-chercheur au laboratoire ETIS et responsable de l’équipe de Neurocybernétique, nous dévoile les avancées du projet MpNav.
Cette technologie innovante propose une nouvelle approche dans la navigation autonome des véhicules. En s’inspirant des mécanismes cognitifs des mammifères, MpNav se distingue par son architecture neuronale avec une approche simple, nécessitant qu’une simple webcam et un ordinateur portable. Ce projet ouvre la voie à des applications variées, notamment dans les environnements où le GPS peut parfois être inopérant.
Focus sur cette technologie disruptive qui pourrait transformer notre quotidien et les défis qu’elle doit encore surmonter pour atteindre sa pleine maturité.
Bonjour Nicolas, pourriez-vous vous présenter en quelques mots ?
Je suis enseignant-chercheur au laboratoire ETIS et je suis responsable de l’équipe de Neurocybernétique qui vise à développer des modèles d’IA plus proches des capacités cognitives humaines et proposer des systèmes robotiques plus autonomes en suivant une approche bio-inspirée et développementale en IA et en Robotique. Mes travaux s’inscrivent dans une approche de neurorobotique qui consiste à embarquer dans des robots, des modèles de cognition spatiale et de navigation issus des travaux conduits chez les mammifères en neurosciences computationnelles.
Pourriez-vous nous en dire plus sur le projet MpNav et à quel stade se situe ce projet ?
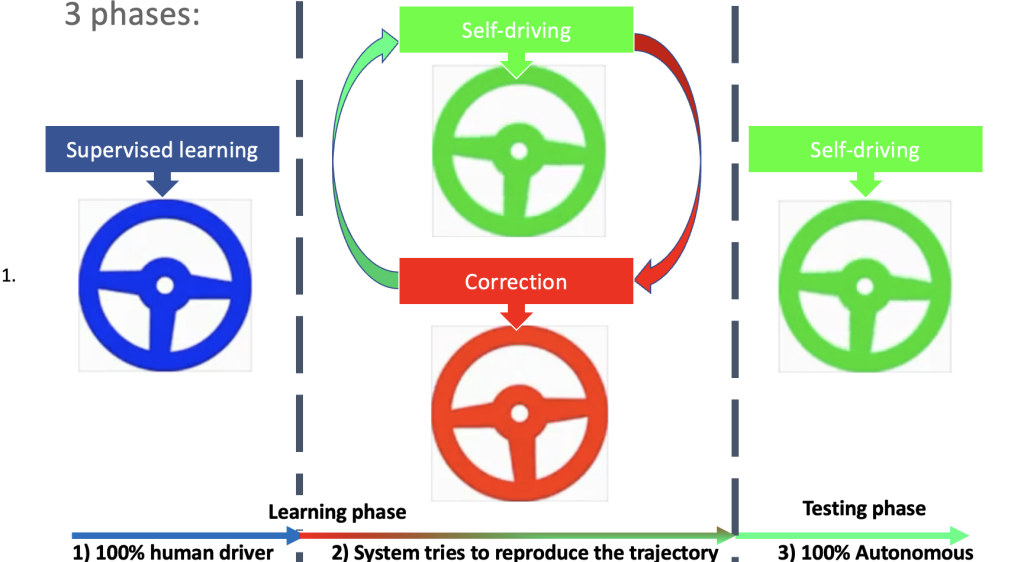
Nous avons développé en partenariat avec l’ITE VEDECOM une architecture de contrôle pour la navigation d’un véhicule autonome à l’aide d’une simple caméra (type webcam) nommée MpNav. Le modèle permet d’apprendre à reproduire, en interaction avec un pilote humain, des trajectoires conduisant le véhicule d’un point de départ à sa destination.
MpNav se veut une innovation de rupture avec une architecture neuronale s’inspirant du cerveau des mammifères. Cette approche, dite de neurorobotique, diffère ainsi des approches classiques en robotique ou celles basées sur des techniques d’IA comme l’apprentissage profond. La technologie proposée dans MPNAV est disruptive d’une part car elle repose sur un type de représentation de l’espace très différent de ce qui est utilisé en robotique classiquement, et d’autre part elle s’inscrit dans une démarche d’IA frugale, à faible consommation de donnée et d’énergie, elle ne nécessite par exemple qu’une simple webcam et un ordinateur portable pour fonctionner. Elle ne nécessite donc pas de lidar couteux ou de grosses cartes de calculs de type GPU. Deux types d’apprentissage complémentaires ont lieu simultanément : un apprentissage rapide (en 1 coup) de la scene visuelle pour permettre au véhicule de se localiser (apprentissage de lieux visuels) et un second apprentissage, incrémental cette fois, par imitation du conducteur afin d’apprendre le trajet désiré en liant le lieu reconnu à chaque instant avec une direction.
Les applications visées pourraient être le stationnement dans de grands parkings (ou les zones dites de canyons urbains : là ou le GPS fonctionne moins bien), ou des trajectoires fréquentes comme les déplacement domicile / lieu de travail…
Actuellement cette technologie est à un niveau de TRL entre 3 et 4.

Comment cette technologie est elle valorisée ?
Ces travaux sont le fruit de plusieurs thèses menées en collaboration avec l’ITE VEDECOM depuis 2016. En 2022, à la fin de la thèse de S. Colomer qui a permis les premières évaluations sur véhicule réel, nous avons entamé les procédures pour le dépôt d’un brevet commun CYU / VEDECOM. Puis nous avons pu poursuivre ce projet en pré-maturation par le bias du programme de pré-maturation de Sci-Ty dont nous avons été lauréat. Ceci nous a permis de recruter un ingénieur pendant un an pour avancer sur des aspects d’automatisation de tests en simulations afin de compléter notre analyse de la robustesse du modèle (différentes météos, etc..).
Nous avons également été sollicités pour contribuer au livre blanc de Sci-Ty sur la stratégie Mobilité de Sci-Ty sous la forme d’un témoignage croisé avec 2 autres lauréats de ce même programme.
Des présentations ont été faites du projet MpNav (sans divulgation des aspects techniques) lors de différents évènements comme lors des Tech’days organisés par le PUI CY Transfer ou à l’occasion d’un comité de domaine n°2 de l’ITE VEDECOM.
Merci à Nicolas Cuperlier.
Vous souhaitez en savoir plus ?
Rendez-vous sur le site Web du laboratoire ETIS.




